Introduction
Sherlock is stuck in a featureless desert wasteland with nothing but a compass in his pocket. He must find his way out using the clues scattered in the desert.
USP
- IR signal reception and decoding
- Path optimisation
- Magnetic heading following
Problem Statement
Build an autonomous robot that can follow compass headings to go from start to finish using IR receiver to receive arena and waypoint information, while optimizing its path.
Description
- The arena consists of a start, a finish points and other intermediate waypoints. The start, finish and waypoints are collectively referred here as POI (points of interest).
Each POIs is identified by its unique ID. - These POIs have a circular area of 5 cm radius with IR transmitters on the centre. The IR transmitter transmits ID of the respective POI and other information as stated below.
- The information is transmitted through messages using NEC IR protocol. For more information, refer the Tutorial.
- A message starts with
400as start code ends with500as end code.450is the code used as separator in between the messages. - A POI may transmit multiple such messages (max 9). Then each message will be tagged with a two digit message_tag.
The first digit denotes the present message id, while the second digit denotes the total number of messages to be transmitted from that POI. - Heading and magnetic heading as mentioned henceforth, refer to the direction with respect to the magnetic north direction of the Earth at that position.
So if heading to a point is 90 degrees, it points towards East.
Arena
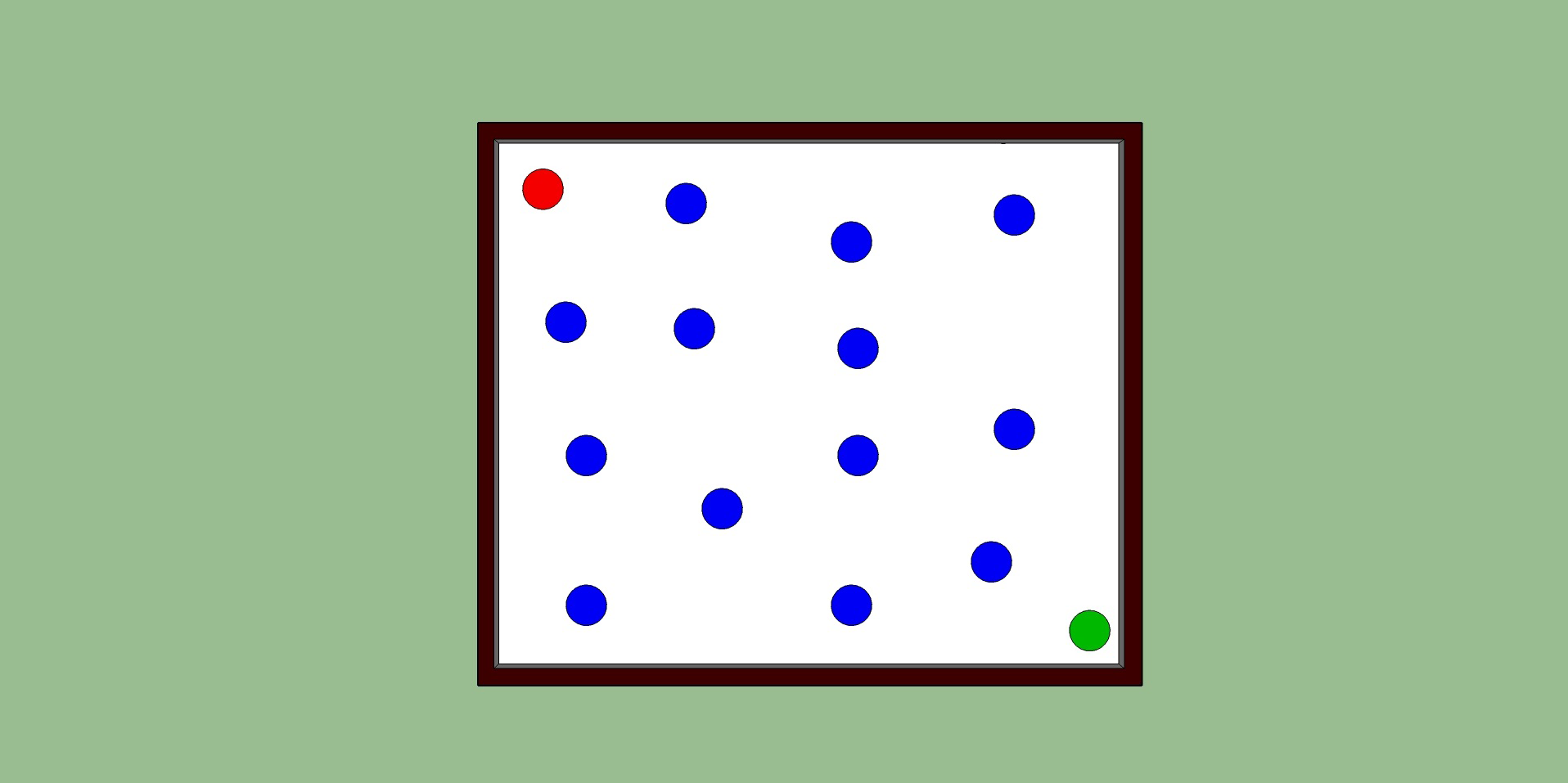
Depictive Arena
- Legend:
- Red POI: Start POI
- Blue POI: Intermediate POIs
- Green POI: Finish POI
- Green Lines: Valid edges
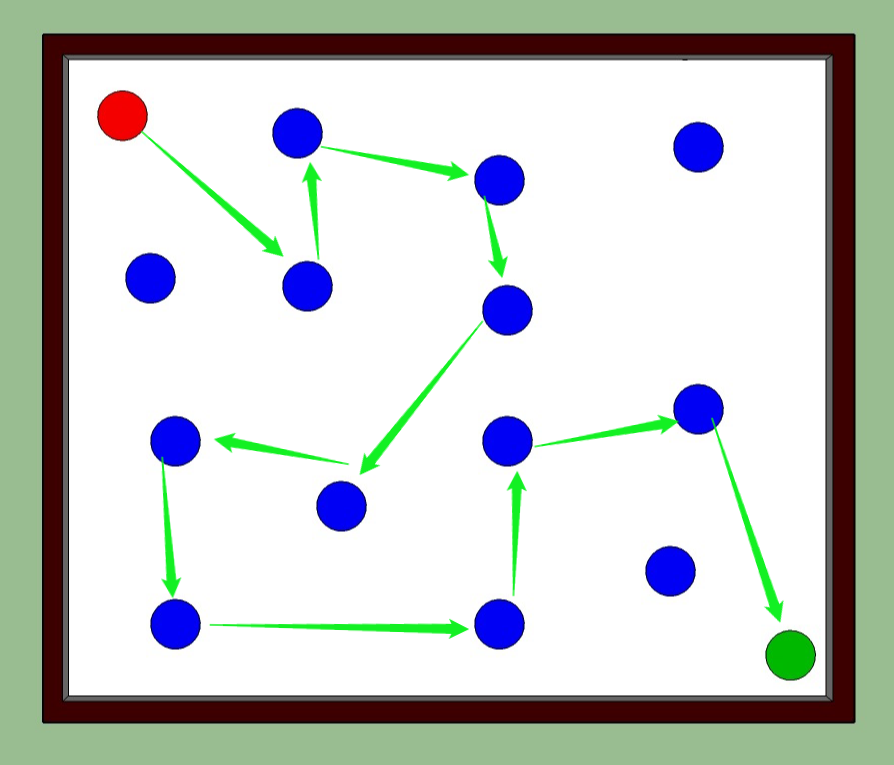
Sample Arena
Round 1
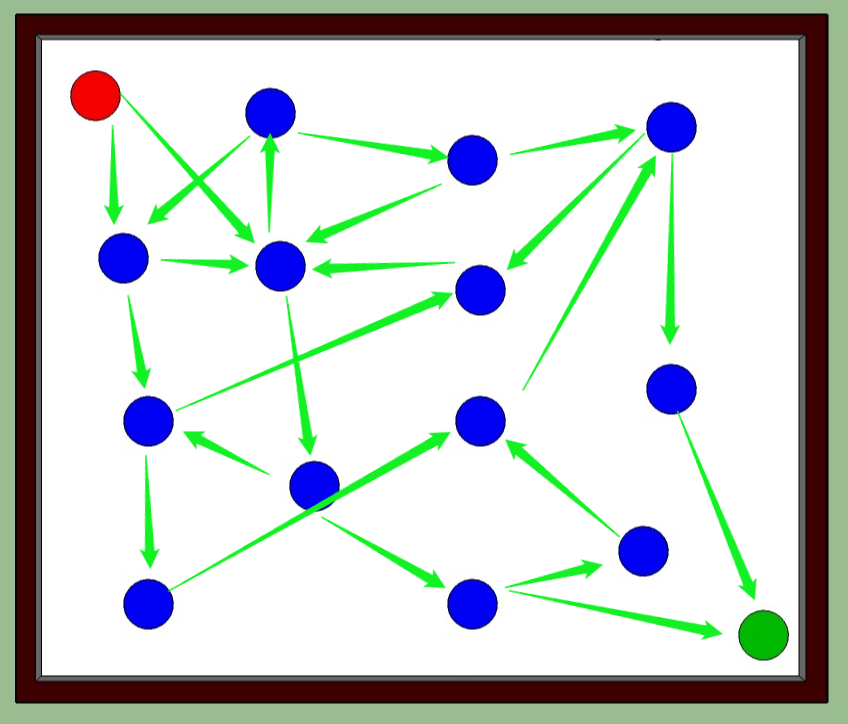
Round 2
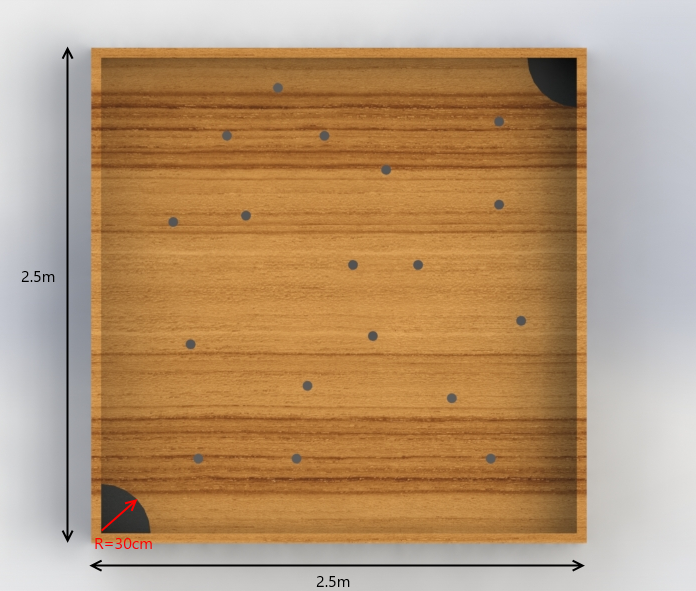
Actual Arena
Task
Round 1
-
Each waypoint will provide heading to a single POI. For example, waypoint 2 transmits the info for waypoint 4 in format as follows:
start message_tag own_id [id heading cost]s stop 400 11 2 4 260 20 500Here
400is the start code,11is message_tag (1st of the 1 total messages),2is the ID of the current waypoint, and it is connected to waypoint4at headings of260degrees via an edge of costs20. - When the participant’s run starts, the bot is placed on start point. The start point will provide the following information:
-
A1: Finish POI for that particular run. Eg:
start msg_tag own_id finish_id stop 400 12 0 21 500where
0is ID of the starting POI and21is the ID of the finish POI.
Here400is the start code,12is the message ID (1st of the 2 total messages),0is the ID of the current POI and 21 is the ID of the finish POI,500at the end being the stop code. -
A2: Heading for only the first possible waypoint after itself. Eg:
start msg_tag own_id [id heading cost]s stop 400 22 0 2 260 20 500Here
400is the start bit,22is the message_id (2nd of the 2 total messages),0is the ID of the current POI and the next waypoint is the POI with the ID2at a heading of260degrees and cost20, and finally500is the stop code.
-
- All the edge costs are equal to
20. - The bot has to reach the final POI, which is
21in the above example. - The bot has to follow only the valid edges. If waypoint
2directs the bot to waypoint3, then it has to head towards waypoint3only, otherwise there would be a penalty. - There will be no explicit markings on the arena to indicate valid edges.
- If the bot gets lost in the arena and stumbles upon a POI, then it has to plan a way to continue its pre planned path going through valid edges.
Round 2
-
Each POI will provide heading to a single or multiple different other POIs. For example, waypoint 3 transmits that it’s connected to waypoint 2,6 and 5 in format as follows:
start message_tag own_id [id heading cost]s stop 400 11 3 2 260 10 6 180 45 5 300 39 500Here
400is the start code,11is message_tag (1st of the 1 total messages),3is the ID of the current POI, and it is connected to POIs2,6and5at headings of260degrees,180degrees and300degrees via edges of costs10,45and39respectively. - When the participant’s run starts, the bot is placed on start point. The start point will provide the following information:
-
A1: POIs each waypoint directs to. Eg:
start msg_tag own_id [waypoint [waypoint_it_directs to]s separator]s stop 400 13 0 2 3 6 5 450 3 5 2 7 450 500Here
400is the start code,13is the message_id (1st of the 3 total messages),0is the ID of the current POI.
Waypoint2is connected to waypoints3,6and5. Waypoint3is connected to waypoints5,2and7, and finally500is the stop code. The450s as mentioned are separators. -
A2: Finish point for that particular run. Eg:
start msg_tag own_id finish_id stop 400 23 0 21 500Here,
400is the start code,23is the message_id (2nd of the 3 total messages),0is ID of the current POI and21is the ID of the finish POI,500at the end being the stop code. -
A3: Heading for only the first possible waypoint after itself. Eg:
start msg_tag own_id [id heading cost]s stop 400 33 0 2 260 25 500Here
400is the start code,33is the message_id (3rd of the 3 total messages),0is the ID of the current POI and the next POI is the POI with ID2at heading of260degrees and cost25, with500being the stop code.
-
- So the bot gets to know the entire connected graph on the start POI.
- The bot has to plan its route passing through the minimum number of POIs from the start POI and minimising the cost of travel along its way to reach the predefined finish POI while, traversing through only the valid edges.
- There will be no explicit markings on the arena to indicate valid edges.
-
The edge cost between two POIs is a biquadratic function of the absolute value of their difference in their IDs modulo 5. The cost between POIs with ids
mandnis defined thus as:cost(m, n) = ax ^ 4 + bx ^ 3 + cx ^ 2 + dx + e where x = |m-n| % 5Where
%is the modulo operator, denoting the remainder when absolute value ofm - nis divided by 5, which can be 0, 1, 2, 3 or 4.-
Thus cost of an edge between POI 2 and 16 is
256a + 64b + 16c + 4d + eas
(16-2)%5=4. - All the constants
a,b,c,d,eare all non-negative integers. - The constants
a,b,c,d,eare unknown and the bot has to find them itself using techniques of simultaneous equations. The robot knows the edge IDs and can solve five equations after getting sufficient information. - Please note that this biquadratic edge cost term comes into play only in round 2, round 1 has all edge costs equal to
20.
-
- If the bot gets lost in the arena and comes back to a POI, then it has to plan a way to continue its pre planned path going through valid edges.
Rounds
Round 1
- Each waypoint will send the bot to only one other waypoint.
- The bot must simply follow the directions to the finish POI.
- The round will be of 3 minutes duration, after which the run would be stopped immediately and score would be calculated.
- If finish point is reached then the bot has to flash an LED.
Round 2
- Waypoints will be transmitting heading and cost information for single or multiple other waypoints.
- Start POI will transmit the heading and cost for its immediate neighbour POIs and providing referencing information for the entire arena, i.e. which waypoints each waypoint on the arena provides the headings for.
- Robot has to plan its best optimized path with the information being given from the start POI as mentioned in Task above.
- Once the bot reaches the finish point it must flash an LED.
- The round will be of 5 minutes duration, after which the run would be stopped immediately and score would be calculated.
Rules and Specifications
General Rules
- The robot should be completely autonomous.
- All arena dimensions have a tolerance of 10%.
- Each team can consist of a maximum of 4 members.
- Each team should have unique participants i.e. no two teams can have even a single participant common.
- The team members can be from different institutes or colleges.
- The right spirit of participation is expected from the participants.
- The decision of the Team ROBOTIX will be final and binding.
Technical Rules
- A standard 220 volt AC supply will be provided by Team Robotix in the arena.
- All circuitry and sensory equipment should be placed on the robot adhering to the ROBOT SPECIFICATIONS.
- Participants will have to bring their own programmers, cables and softwares. No programmers will be supplied.
- Hard coding is NOT allowed. Hard coding is defined here.
- The robot can be powered on-board as well as off-board.
- No kind of external control will be allowed.
Event Rules
Robot Specifications
- Each robot can have maximum dimension of
25cm * 25cm * 20cm(LBH) respectively. - No part/mechanism of/on the robot should exceed the given dimensions before the commencement of the event run. The robots can exceed their respective dimensions once the event commences.
- The autonomous robots should be completely autonomous with on-board processing, i.e., the robots cannot be controlled by a remotely kept computer.
- LEGO kits or its spare parts or pre-made mechanical parts are not allowed.
- Ready-made gearboxes, sensors, development boards can be used but no other part of the robot should contain any ready-made components. Simple car bases with no extra features may be used.
- The bots should not harm the Sherlock event arena in any way. If it does so, a penalty will be imposed on the team. The magnitude of the penalty will be decided by Team ROBOTIX.
- Processors of less than 16-bits are allowed. ARM processors are not allowed.
POIs:
- The POIs are small holes in the arena that have an IR LED inserted into each of them. The range is such that the TSOP1738 IR Receiver can detect a POI from a distance of about 2 cm from the POI.
- The POIs would transmit binary data at 38KHz frequency in strictly NEC IR format. The format has been detailed in the Sherlock tutorial.
Magnetic Heading:
- The magnetic heading would strictly be calculated with respect to north pole of earth wrt IIT Kharagpur campus. Although, the code doesn’t require calibration as long as it is written anywhere in India/neighbours
- We have used Adafruit HMC5883L library for calibration. Usage of other compass modules or other libraries is not recommended and any discrepancies thus caused would not be the responsibility of Team Robotix.
- The magnetic heading would be given in degrees from 0 to 359 and not in radians.
Restarts/Timeouts:
- In Round 1, the participant can take a maximum of 1 timeout of 2 minutes. In Round 2, 2 such timeouts may be taken. Penalty will be imposed for each timeout and the robot will start from the last POI crossed.
- In Round 1, the participant’s robot can have a maximum of 2 restarts. In Round 2, the participant’s robot can take 2 such restarts. A penalty will be imposed on the team for every restart that they take. In case of a restart the participant’s robots will be placed on the start POI. The timer will be reset to zero and the run will start afresh with the addition of the penalty for the restart.
- Restarts will only be awarded to the participant in case of a technical failure of the bot.
- If the robot goes outside the arena, then the team has to take a restart or call off their run.
Scoring
Round 1
Base Score: 1000
Rewards
- Reaching the Finish POI:
500(F) - Reaching each valid POI:
100(P)
Penalties
- Traversing an invalid edge once:
-200(X) - Timeout:
-250(T) - Restart:
-400(R)
Scoring Formula:
-
The final score is given by:
1000 + 500*(F) + 100*(P) - 200*(X) -250*(T) - 400*(R)
Round 2
Base Score: 2000
Rewards
- Reach Finish POI:
1000(F)
Penalties
- Traversing an invalid edge once:
-200(X) - Traversing each POI:
-A(P) - Sum of edge costs incurred in reaching the Finish POI:
-B(TC) - Timeout:
-500(T) - Restart:
-800(R)
The constants A and B will be declared during the fest.
Scoring Formula:
-
The final score is given by:
2000 + 1000*(F) - 200*(X) - A*(P) -B*(TC) -500*(T) - 800*(R) -
The team with the maximum score wins.
If two participants manage to get the same score, then the participant with lowest time taken is declared the winner.
Contact
Aditya Narayan
aditya.narayan@robotix.in
Mratunjay Gupta
mratunjay@robotix.in